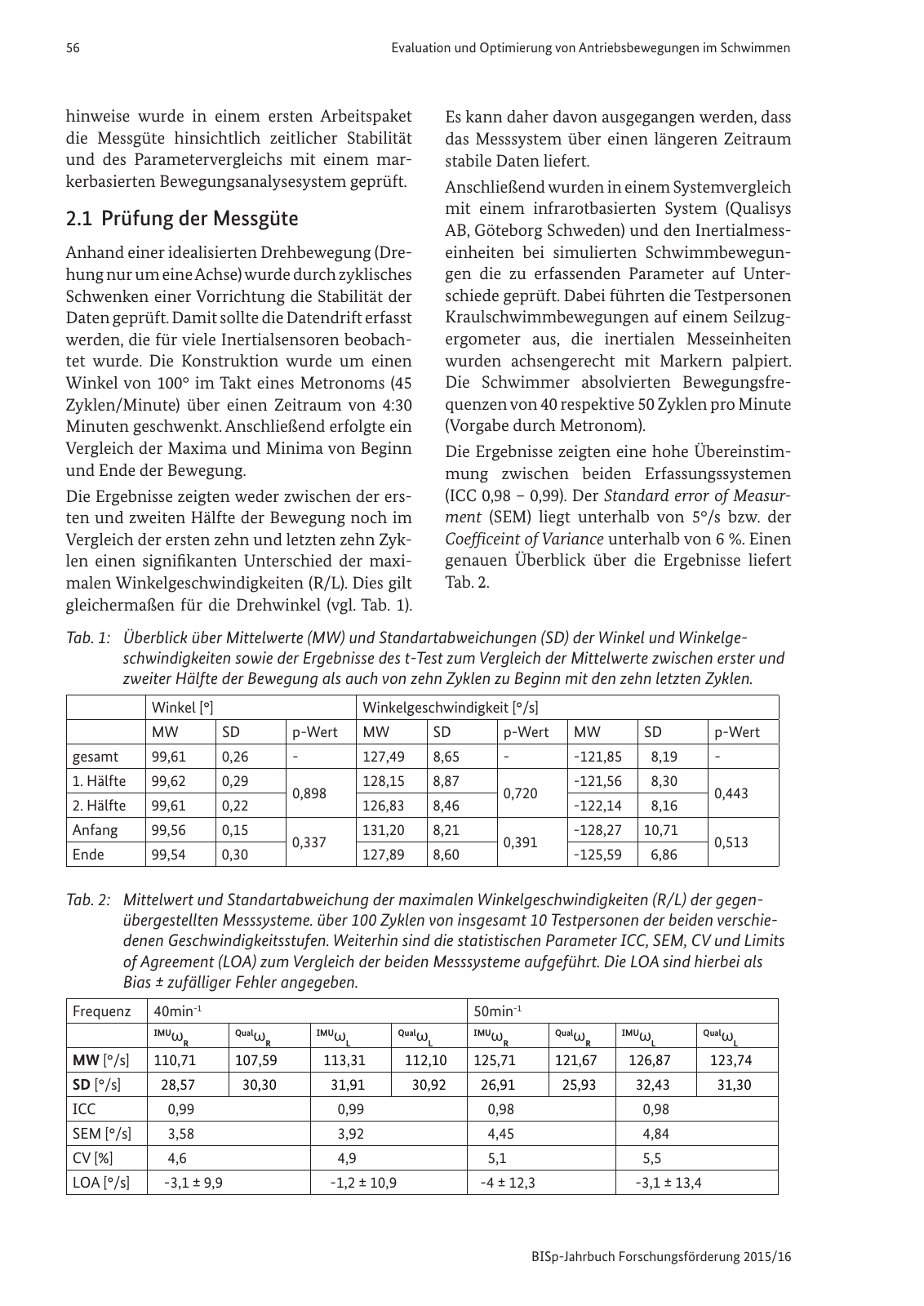
56 BISp Jahrbuch Forschungsförderung 2015 16 Evaluation und Optimierung von Antriebsbewegungen im Schwimmen hinweise wurde in einem ersten Arbeitspaket die Messgüte hinsichtlich zeitlicher Stabilität und des Parametervergleichs mit einem mar kerbasierten Bewegungsanalysesystem geprüft 2 1 Prüfung der Messgüte Anhand einer idealisierten Drehbewegung Dre hung nur um eine Achse wurde durch zyklisches Schwenken einer Vorrichtung die Stabilität der Daten geprüft Damit sollte die Datendrift erfasst werden die für viele Inertialsensoren beobach tet wurde Die Konstruktion wurde um einen Winkel von 100 im Takt eines Metronoms 45 Zyklen Minute über einen Zeitraum von 4 30 Minuten geschwenkt Anschließend erfolgte ein Vergleich der Maxima und Minima von Beginn und Ende der Bewegung Die Ergebnisse zeigten weder zwischen der ers ten und zweiten Hälfte der Bewegung noch im Vergleich der ersten zehn und letzten zehn Zyk len einen signifikanten Unterschied der maxi malen Winkelgeschwindigkeiten R L Dies gilt gleichermaßen für die Drehwinkel vgl Tab 1 Es kann daher davon ausgegangen werden dass das Messsystem über einen längeren Zeitraum stabile Daten liefert Anschließend wurden in einem Systemvergleich mit einem infrarotbasierten System Qualisys AB Göteborg Schweden und den Inertialmess einheiten bei simulierten Schwimmbewegun gen die zu erfassenden Parameter auf Unter schiede geprüft Dabei führten die Testpersonen Kraulschwimmbewegungen auf einem Seilzug ergometer aus die inertialen Messeinheiten wurden achsengerecht mit Markern palpiert Die Schwimmer absolvierten Bewegungsfre quenzen von 40 respektive 50 Zyklen pro Minute Vorgabe durch Metronom Die Ergebnisse zeigten eine hohe Übereinstim mung zwischen beiden Erfassungssystemen ICC 0 98 0 99 Der Standard error of Measur ment SEM liegt unterhalb von 5 s bzw der Coefficeint of Variance unterhalb von 6 Einen genauen Überblick über die Ergebnisse liefert Tab 2 Tab 1 Überblick über Mittelwerte MW und Standartabweichungen SD der Winkel und Winkelge schwindigkeiten sowie der Ergebnisse des t Test zum Vergleich der Mittelwerte zwischen erster und zweiter Hälfte der Bewegung als auch von zehn Zyklen zu Beginn mit den zehn letzten Zyklen Winkel Winkelgeschwindigkeit s MW SD p Wert MW SD p Wert MW SD p Wert gesamt 99 61 0 26 127 49 8 65 121 85 8 19 1 Hälfte 99 62 0 29 0 898 128 15 8 87 0 720 121 56 8 30 0 443 2 Hälfte 99 61 0 22 126 83 8 46 122 14 8 16 Anfang 99 56 0 15 0 337 131 20 8 21 0 391 128 27 10 71 0 513 Ende 99 54 0 30 127 89 8 60 125 59 6 86 Tab 2 Mittelwert und Standartabweichung der maximalen Winkelgeschwindigkeiten R L der gegen übergestellten Messsysteme über 100 Zyklen von insgesamt 10 Testpersonen der beiden verschie denen Geschwindigkeitsstufen Weiterhin sind die statistischen Parameter ICC SEM CV und Limits of Agreement LOA zum Vergleich der beiden Messsysteme aufgeführt Die LOA sind hierbei als Bias zufälliger Fehler angegeben Frequenz 40min 1 50min 1 IMUωR QualωR IMUωL QualωL IMUωR QualωR IMUωL QualωL MW s 110 71 107 59 113 31 112 10 125 71 121 67 126 87 123 74 SD s 28 57 30 30 31 91 30 92 26 91 25 93 32 43 31 30 ICC 0 99 0 99 0 98 0 98 SEM s 3 58 3 92 4 45 4 84 CV 4 6 4 9 5 1 5 5 LOA s 3 1 9 9 1 2 10 9 4 12 3 3 1 13 4
Hinweis: Dies ist eine maschinenlesbare No-Flash Ansicht.
Klicken Sie hier um zur Online-Version zu gelangen.
Klicken Sie hier um zur Online-Version zu gelangen.