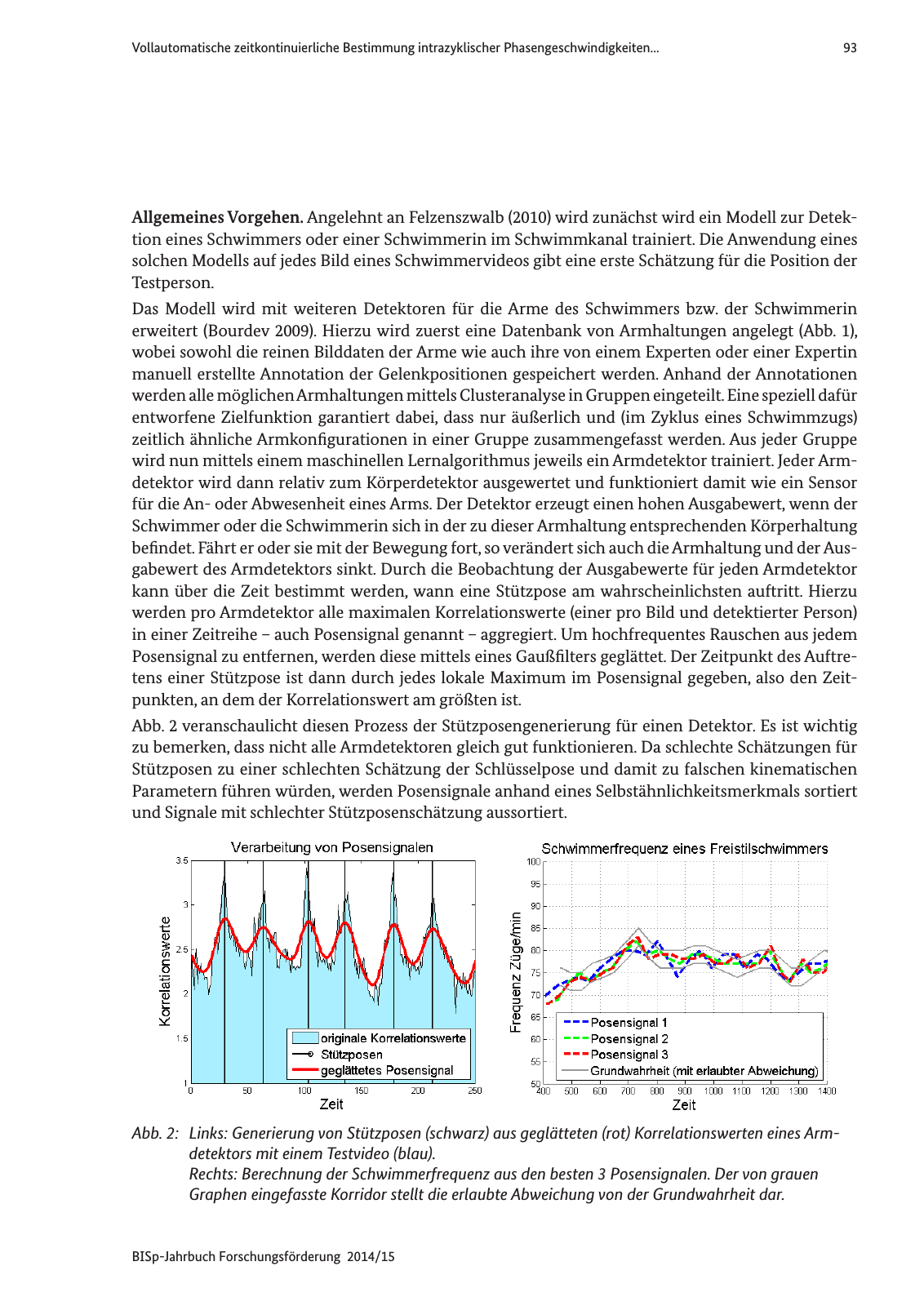
93Vollautomatische zeitkontinuierliche Bestimmung intrazyklischer Phasengeschwindigkeiten BISp Jahrbuch Forschungsförderung 2014 15 Allgemeines Vorgehen Angelehnt an Felzenszwalb 2010 wird zunächst wird ein Modell zur Detek tion eines Schwimmers oder einer Schwimmerin im Schwimmkanal trainiert Die Anwendung eines solchen Modells auf jedes Bild eines Schwimmervideos gibt eine erste Schätzung für die Position der Testperson Das Modell wird mit weiteren Detektoren für die Arme des Schwimmers bzw der Schwimmerin erweitert Bourdev 2009 Hierzu wird zuerst eine Datenbank von Armhaltungen angelegt Abb 1 wobei sowohl die reinen Bilddaten der Arme wie auch ihre von einem Experten oder einer Expertin manuell erstellte Annotation der Gelenkpositionen gespeichert werden Anhand der Annotationen werden alle möglichen Armhaltungen mittels Clusteranalyse in Gruppen eingeteilt Eine speziell dafür entworfene Zielfunktion garantiert dabei dass nur äußerlich und im Zyklus eines Schwimmzugs zeitlich ähnliche Armkonfigurationen in einer Gruppe zusammengefasst werden Aus jeder Gruppe wird nun mittels einem maschinellen Lernalgorithmus jeweils ein Armdetektor trainiert Jeder Arm detektor wird dann relativ zum Körperdetektor ausgewertet und funktioniert damit wie ein Sensor für die An oder Abwesenheit eines Arms Der Detektor erzeugt einen hohen Ausgabewert wenn der Schwimmer oder die Schwimmerin sich in der zu dieser Armhaltung entsprechenden Körperhaltung befindet Fährt er oder sie mit der Bewegung fort so verändert sich auch die Armhaltung und der Aus gabewert des Armdetektors sinkt Durch die Beobachtung der Ausgabewerte für jeden Armdetektor kann über die Zeit bestimmt werden wann eine Stützpose am wahrscheinlichsten auftritt Hierzu werden pro Armdetektor alle maximalen Korrelationswerte einer pro Bild und detektierter Person in einer Zeitreihe auch Posensignal genannt aggregiert Um hochfrequentes Rauschen aus jedem Posensignal zu entfernen werden diese mittels eines Gaußfilters geglättet Der Zeitpunkt des Auftre tens einer Stützpose ist dann durch jedes lokale Maximum im Posensignal gegeben also den Zeit punkten an dem der Korrelationswert am größten ist Abb 2 veranschaulicht diesen Prozess der Stützposengenerierung für einen Detektor Es ist wichtig zu bemerken dass nicht alle Armdetektoren gleich gut funktionieren Da schlechte Schätzungen für Stützposen zu einer schlechten Schätzung der Schlüsselpose und damit zu falschen kinematischen Parametern führen würden werden Posensignale anhand eines Selbstähnlichkeitsmerkmals sortiert und Signale mit schlechter Stützposenschätzung aussortiert Abb 2 Links Generierung von Stützposen schwarz aus geglätteten rot Korrelationswerten eines Arm detektors mit einem Testvideo blau Rechts Berechnung der Schwimmerfrequenz aus den besten 3 Posensignalen Der von grauen Graphen eingefasste Korridor stellt die erlaubte Abweichung von der Grundwahrheit dar
Hinweis: Dies ist eine maschinenlesbare No-Flash Ansicht.
Klicken Sie hier um zur Online-Version zu gelangen.
Klicken Sie hier um zur Online-Version zu gelangen.