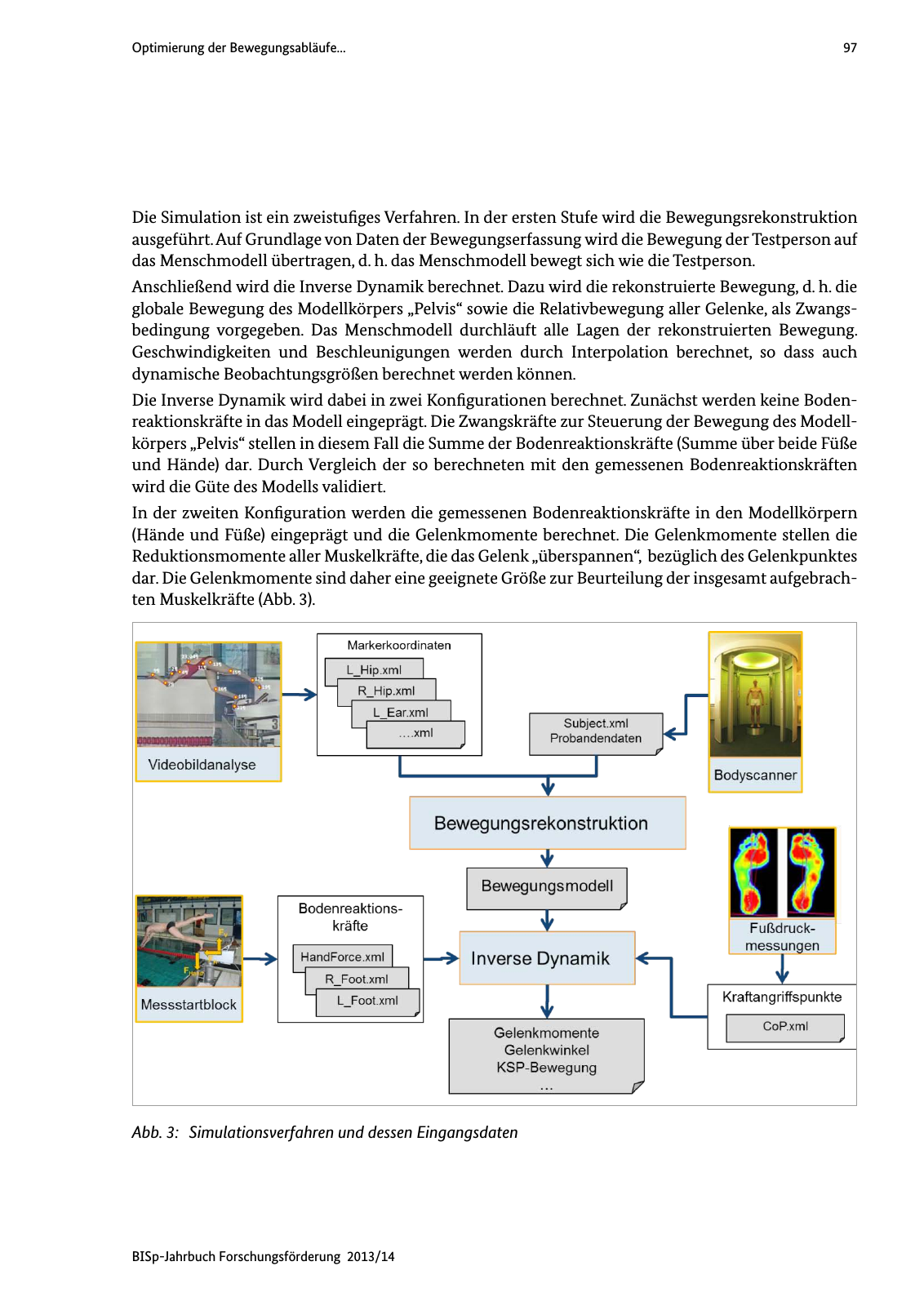
97Optimierung der Bewegungsabläufe BISp Jahrbuch Forschungsförderung 2013 14 Die Simulation ist ein zweistufiges Verfahren In der ersten Stufe wird die Bewegungsrekonstruktion ausgeführt Auf Grundlage von Daten der Bewegungserfassung wird die Bewegung der Testperson auf das Menschmodell übertragen d h das Menschmodell bewegt sich wie die Testperson Anschließend wird die Inverse Dynamik berechnet Dazu wird die rekonstruierte Bewegung d h die globale Bewegung des Modellkörpers Pelvis sowie die Relativbewegung aller Gelenke als Zwangs bedingung vorgegeben Das Menschmodell durchläuft alle Lagen der rekonstruierten Bewegung Geschwindigkeiten und Beschleunigungen werden durch Interpolation berechnet so dass auch dynamische Beobachtungsgrößen berechnet werden können Die Inverse Dynamik wird dabei in zwei Konfigurationen berechnet Zunächst werden keine Boden reaktionskräfte in das Modell eingeprägt Die Zwangskräfte zur Steuerung der Bewegung des Modell körpers Pelvis stellen in diesem Fall die Summe der Bodenreaktionskräfte Summe über beide Füße und Hände dar Durch Vergleich der so berechneten mit den gemessenen Bodenreaktionskräften wird die Güte des Modells validiert In der zweiten Konfiguration werden die gemessenen Bodenreaktionskräfte in den Modellkörpern Hände und Füße eingeprägt und die Gelenkmomente berechnet Die Gelenkmomente stellen die Reduktionsmomente aller Muskelkräfte die das Gelenk überspannen bezüglich des Gelenkpunktes dar Die Gelenkmomente sind daher eine geeignete Größe zur Beurteilung der insgesamt aufgebrach ten Muskelkräfte Abb 3 Abb 3 Simulationsverfahren und dessen Eingangsdaten
Hinweis: Dies ist eine maschinenlesbare No-Flash Ansicht.
Klicken Sie hier um zur Online-Version zu gelangen.
Klicken Sie hier um zur Online-Version zu gelangen.